The Pathfinder 01 airframe was completed and shipped to South Australia on the 23rd of October for display at the end of year undergraduate expo's at both Adelaide & Flinders Universities. Displayed in the above picture minus the payload compartment is Pathfinder with Adelaide University (UoA) student team left to right: M. Pathmanathan S. Barone S.M. Wilksch A. Thomas

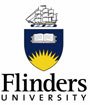
Above is the version 0.1 Recovery Controller (RC) developed by the UoA team, next to the Pathfinder rocket for scale. It is based on the powerful and flexible STR71 ARM MCU, which was chosen for its processing power along with the myriad of interfaces on chip. The unit provides barometric altitude in combination with a 3 axis accelerometer with +/- 50g x,y axis & 100g z axis. Interface to the main flight computer is via serial link, with the option of CAN and or USB. A PC104 form factor was chosen to allow ease of integration through a stackable board standard. Additional 18bit analog channels are available via pin headers onboard, which allow further vehicle discrete measurements.
The generous support of ST Microelectronics with development tools, and MCU's made possible the rapid development of a first generation hardware solution.