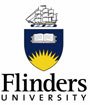
The Electronics for the payload unit being developed at Flinders University are now 90% built. The inertial sensor and GPS board is shown mounted on top of the PC104 single board computer. This configuration will form the payload module from Flinders University.

The build was mostly successful although a few complications occurred in the process. The gyros used are ADXRS300 parts which are only available in a 32 ball BGA part which is difficult to mount by hand without the necessary equipment. 2 of 3 were successfully placed on the first attempt using a hot air tool, the third was a failure. Another gyro is being sourced as a replacement.
The board is currently being tested and programmed to interface to the Vulcan single board computer. The single board computer is running an extended kalman filter under the eCos operating system to estimate the rockets position and attitude from the inertial data and GPS.





No comments:
Post a Comment